13�D��]���鍄�̂�L����n�̐U��
13.1�@��]�@�B�̕s�ނ荇��
�@�}13-1�́C�O�H�d�H���葢�D���j���قɓW������Ă���j�������^�[�r���̈ꕔ�ŁC�ߋ��̋��P�Ƃ��Ĉ�ʓW������Ă���C�N�ł����邱�Ƃ��ł���D�i�j���َ������߁F�h�X�y�C�������^�[�r�����[�^�[�j�Ёh�@���a47�N�i1970�j������]����50t�̑�^�^�[�r�����[�^�[���j��Ƃ����^�[�r���j��Ɏc�鎩�Ȃ��o�������D�j��̋N�_�Ɣ�J�j���j����܂ޔj�Ђ�������W������Ă���D�j��͊w��M�d�Ȏ����ł���ޗ����x�ɂ��������҂ɂƂ��ĕK���̉��l������D���̎��̂ɂ���ē��{�̃��[�^�[�����Z�p�͔���I�ɉ��P���ꂽ�D�܂��C������_�@�Ƃ��Ĉ��������X�y�C������30MW10����܂�26��̃^�[�r���������D�����C��^�^�[�r���̗A�o�͂�����X�^�[�g���C�����̑S���E�ւ̗A�o�g������������D�j

�}13-1�@�j�������^�[�r�����[�^�[�i�O�H�d�H���葢�D���j
Question 1�F���̂���]������ƐU����������͉̂��́H
�}13-2�́C���d�p�^�[�r���̊O�ςƎ��ۂɒ����d�͏���c���d���Ŏg�p����Ă���550MW�p�̉Η͔��d�p�^�[�r�����̗�ł���D���̃N���X�̃^�[�r���͏��C�𑗂荞�݁C������3000rpm���x�Œ��I�ɉ�]�����C���̉�]�d�@�Ɍq���d�͂���������d�g�݂ƂȂ��Ă���D�^�Ă�^�~�ɔ�������d�͗ʂ̌������ւ̑Ή���g�p�d�͂̕ω��ɑΉ����āC���C�̗��ʒ��߂��K�v�ƂȂ�C���̑匳�ƂȂ�R�ď�Ԃ̕ω��͔������Ȃ����ߔR�Ăɔ����ϓ��������ꍇ������C��]�ɔ����U�������łȂ��R�Ă◬���ɋN�������U���Ȃǂ���������D24����365���ɘj���Ĉ���I�ɉ�]�����C�G�l���M�[�����������������ʂɎ������Ă��邪�C�����ɂ͗l�X�Ȋ�b�ƂȂ�Z�p�̐ςݏd�˂�����D
 �@�@�@
�@�@�@
(a) �^�[�r���T�ρ@�@�@�@(b) �^�[�r������
�}13-2�@���d�p�^�[�r���ƃ^�[�r������
Question 2�F�~�`�f�ʕ��̂����̒��S�����ɉ�]����ꍇ�ł��U�����N����͉̂��́H
�@�H�앨�ɂ́C�����Ƃ�����̂��K�����݂��C�ÓI�ȏꍇ�ɂ͂��قǖ��ɂȂ�Ȃ��ꍇ�ł��C�^�����n�߂�Ƒ傫�Ȗ����N�����\����L������̂����������݂���D�}13-3�ɂ��̗�������D�f�ʂ��~�`��̂��́C�Ⴆ�C��]�������H����ꍇ�C�������ɂ܂��������H����i���j�C�~�������Ɏ����S���瓯�����a�ň��]���H����ꍇ�C�K���C�ڕW�Ƃ���l����̂��ꂪ������̂���ł���D�]���āC�g���̍ۂɂ́C���@������ݒ肵�C�g�����̏ɉ����Ă͂ߍ������̌��܂��v�}�ʏ�ɒ���D

�}13-3�@�H�앨�̊����̗�
�@�`�~�`�f�ʕ��́C�~���̂����S�����ɉ�]����ꍇ�̓����ׂ邽�߂̃��f���̗��}13-4�Ɏ����D����͈�ʓI�ȉ�]�́i���[�^�[�j�̉^�����l����ۂ̃��f���ŁC��]���SO����d�S�ʒuG��$\bar{OG}=a$�����킸���ɂ���Ă���C���ꂪ�p���x$\Omega$�ʼn�]���Ă���ƍl����D$a$�́h�ΐS�����h�ƌĂ�C��]�̂̎��ʂƋ��ɂ��̌n�ɔ�������U�����ۂƌW���������̂ł���D
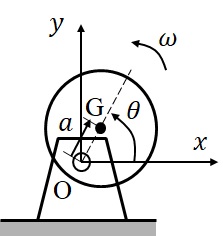
�}13-4�@�d�S�ʒu����]���ƈ�v���Ȃ��ꍇ�̉�]�^�����f��
��]���ł���_O�ɂ����āC��p����͂�}12-5�Ɏ����悤��$F_x$�C$F_y$�Ƃ��C�d�S�ʒu$(x,y)$��p������]�̂̉^�����������l����DNewton�̑��@�����
\begin{eqnarray*}
&& m\ddot{x} = F_x \\
&& m\ddot{y} = F_y
\end{eqnarray*}
�����ŁC�p���x$\omega$�Œ���]���Ă���Ƃ��C��]�p�̊�ʒu��$x$���ɂƂ�ƁC$x$�C$y$���W�́C����$t$�̊��Ƃ��Ď����̂悤�ɕ\�����Ƃ��ł���D
\begin{eqnarray*}
&& x = a\cos\omega t \\
&& y = a\sin\omega t
\end{eqnarray*}
����āC���Ԃœ����������
\begin{eqnarray*}
&& \ddot{x} = -a\omega^2\cos\omega t \\
&& \ddot{y} = -a\omega^2\sin\omega t
\end{eqnarray*}
�ƂȂ�̂ŁC�^�����������C������
\begin{eqnarray*}
&& F_x = -ma\omega^2\cos\omega t \\
&& F_y = -ma\omega^2\sin\omega t
\end{eqnarray*}
�̗͂��Ċp���x$\omega$�Œ���]���Ă��邱�ƂɂȂ�D���̔��͂���]���ɍ�p���Ă��邱�ƂɂȂ�
\begin{eqnarray*}
F=\sqrt{F_x^2+ F_y^2} = ma\omega^2
\end{eqnarray*}
�Ȃ̂ŁC���������͈͂��̗́i���S�́j����p���邪�C���������i$x$�����j�C���������i$y$�����j�ɂ͎����I�ɕϓ�����͂ƂȂ邱�Ƃ�������D
�@���̗͂́C$ma$��$\omega$�ŕ\���ł���̂ŁC�_O�ɑ���d�SG�̈ʒu���x�N�g���ʂŕ\�����āC�s�ނ荇���ʁC���邢�́C�s�ނ荇���x�N�g��
\begin{eqnarray*}
m\mathbf{a}
\end{eqnarray*}
���`���邱�Ƃ��ł���D

�}13-5�@��]�̂̉�]���ɔ��������
13.2 ��]�́i���[�^�j�̕s�ނ荇���ɂ�鋭���U��
�@�}13-6�Ɏ����悤�ɍ��E���S�����C�S�̎��ʂ�$M$�̕��̂��˒萔$k$�̂˂ƔS�������W��$c$�̃_�V���|�b�g�Ŏx������C�㉺�����̉^���̂����U���n���l����D�S�̎��ʂɊ܂܂��s�ނ荇������$m$���l���C�s�ނ荇���ʂ�$ma$�Ƃ��C����]�I�ȉ�]�p���x��$\omega$�Ƃ���D�s�ނ荇������$m$�̏d�S�ʒu��$y$�����̑��Εψ�$y_r$�́C������������ʒu�Ƃ����$y_r=a\sin\omega t$�ƂȂ�̂ŁC��Εψʂ�$y+y_r=y+a\sin\omega t$�ƂȂ�D

�}13-6�@��]�̂̕s�ނ荇���ɂ�萶����P���R�x�S�������n�̋����U�����f��
�s�ނ荇�����ʂƎc��̎��ʕ��ɑ���Free-body Diagram��`���Ɛ}13-7�̂悤�ɂȂ�D�����ŁC
\begin{eqnarray*}
&& f_k = ky \\
&& f_c = c\dot{y}
\end{eqnarray*}
�ƂȂ�̂ŁC�s�ނ荇�����Ǝc��̎��ʕ��C���ꂼ��ɑ���^���������͎��̂悤�ɂȂ�D
\begin{eqnarray*}
&& m\frac{d^2}{dt^2}\left(y+y_r\right) = F_y \\
&& \left(M-m\right)\ddot{y} = -F_y - f_k - f_c = -F_y - ky - c\dot{y}
\end{eqnarray*}
���҂������āC���͂�$F_y$����������Ǝ�����D
\begin{eqnarray*}
M\ddot{y} + c\dot{y} + ky = -m\ddot{y}_r = ma\omega^2\sin\omega t
\end{eqnarray*}
$M$�ŗ��ӂ�����C$p=\sqrt{\frac{k}{M}}$�C$\zeta=\frac{c}{2\sqrt{Mk}}$�ƒu���Ǝ����ƂȂ�D
\begin{eqnarray*}
\ddot{y} + 2\zeta p\dot{y} + p^2y = \frac{m}{M}a\omega^2\sin\omega t
\end{eqnarray*}

�}13-7�@��]�̂̕s�ނ荇���ɂ��P���R�x�S�������n��Free-body Diagram
��퉞�������肵��
\begin{eqnarray*}
y = A\cos\omega t + B\sin\omega t
\end{eqnarray*}
�Ƃ����C����W��$A$�C$B$�����߂�D�����C�^���������ɏ㎮�������Đ�������ƁC
\begin{eqnarray*}
\left(p^2-\omega^2\right)\left(A\cos\omega t + B\sin\omega t\right) + 2\zeta p\omega\left(-A\sin\omega t + B\cos\omega t\right) = \frac{m}{M}a\omega^2\sin\omega t
\end{eqnarray*}
����āC
\begin{eqnarray*}
\cos\omega t\left[\left(p^2-\omega^2\right)A +2\zeta p\omega B\right] + \sin\omega t\left[-2\zeta p\omega A + \left(p^2-\omega^2\right)B - \frac{m}{M}a\omega^2\right] = 0
\end{eqnarray*}
�����C���̍s���������D
\begin{eqnarray*}
\left[\begin{array}{cc}
p^2-\omega^2 & 2\zeta p\omega \\
-2\zeta p\omega & p^2-\omega^2
\end{array}\right] \left[ \begin{array}{c} A \\B
\end{array}\right] = \left[\begin{array}{c}
0 \\ \frac{m}{M}a\omega^2
\end{array} \right]
\end{eqnarray*}
\begin{eqnarray*}
\therefore \left[ \begin{array}{c} A \\B
\end{array}\right] &=&
\frac{1}{\left(p^2-\omega^2\right)^2+\left(2\zeta p\omega\right)^2}
\left[\begin{array}{cc}
p^2-\omega^2 & -2\zeta p\omega \\
2\zeta p\omega & p^2-\omega^2
\end{array}\right] \left[\begin{array}{c}
0 \\ \frac{m}{M}a\omega^2
\end{array} \right] \\
&=&
\frac{\frac{m}{M}a\omega^2}{\left(p^2-\omega^2\right)^2+\left(2\zeta p\omega\right)^2}
\left[\begin{array}{c}
-2\zeta p\omega \\ p^2 -\omega^2
\end{array} \right] = \frac{a\frac{m}{M}\left(\frac{\omega}{p}\right)^2}{\left\{1-\left(\frac{\omega}{p}\right)^2\right\}^2+\left(2\zeta\frac{\omega}{p}\right)^2}
\left[\begin{array}{c}
-2\zeta \frac{\omega}{p} \\ 1 -\left(\frac{\omega}{p}\right)^2
\end{array} \right]
\end{eqnarray*}
�]���āC���̌n�̒�퉞���͎��̂悤�ɕ\���ł���D
\begin{eqnarray*}
y &=& \frac{a\frac{m}{M}\left(\frac{\omega}{p}\right)^2}{\left\{1-\left(\frac{\omega}{p}\right)^2\right\}^2+\left(2\zeta\frac{\omega}{p}\right)^2}
\left[-2\zeta \frac{\omega}{p}\cos\omega t +\left\{1 -\left(\frac{\omega}{p}\right)^2\right\}\sin\omega t\right] \\
&=& \frac{a\frac{m}{M}\left(\frac{\omega}{p}\right)^2}{\sqrt{\left\{1-\left(\frac{\omega}{p}\right)^2\right\}^2+\left(2\zeta\frac{\omega}{p}\right)^2}}
\sin\left(\omega t-\varphi\right)\text{, }\tan\varphi = \frac{2\zeta\frac{\omega}{p}}{1-\left(\frac{\omega}{p}\right)^2}
\end{eqnarray*}
13.3 ��]�́i���[�^�j�̐U����U��
�}13-8�Ɏ����悤�ɓ_O�𒆐S�Ɋp���x$\omega$�ʼn�]���郍�[�^���l����D��]���ɂ͎����݂��C���̒e���ό`���܂ߒe���ό`�ƌ����I�ȓ������l���邱�Ƃ��ł���̂ŁC���������C����сC���������ɂ��ꂼ��˒萔$k$�ƔS�������W��$c$�̃_�V���|�b�g�̕���n�Ŏx������Ă�����̂Ɖ��肷��D����āC���̉�]���SO���}�Ɏ���$(X,Y)$���W�n�ɂ����āC���ꂻ��$x$�C$y$�ψʂ���Ɖ��肷��ƁC�Ή���������̋t������
\begin{eqnarray*}
&& f_X = kx + c\dot{x} \\
&& f_Y = ky + c\dot{y}
\end{eqnarray*}
�̗͂���p���邱�ƂɂȂ�D�����ŁC���[�^�d�SG�̈ʒu�́C$X$����������ʒu�Ɏ���
\begin{eqnarray*}
&& X = x + a\cos\omega t \\
&& Y = y + a\sin\omega t
\end{eqnarray*}
�ƂȂ�̂ŁC���̉^����������D
\begin{eqnarray*}
&& m\ddot{X} = m\left(\ddot{x} - a\omega^2\cos\omega t\right) = -f_X = -kx-c\dot{x} \\
&& m\ddot{Y} = m\left(y - a\omega^2\sin\omega t\right) = -f_Y = -ky - c\dot{y}
\end{eqnarray*}
��������Ǝ����ƂȂ�D
\begin{eqnarray*}
&& m\ddot{x} + c\dot{x} + kx = ma\omega^2\cos\omega t
&& m\ddot{y} + c\dot{y} + ky = ma\omega^2\sin\omega t
\end{eqnarray*}
����āC��Q���ɋ����P��$i$�������ė�����������D
\begin{eqnarray*}
m\left(\ddot{x} + i\ddot{y}\right) + c\left(\dot{x}+i\dot{y}\right) + k\left(x+iy\right) = ma\omega^2\left(\cos\omega t+i\sin\omega t\right)
\end{eqnarray*}
�]���āC$z=x+iy$�ƒu���Ǝ����ƂȂ�D
\begin{eqnarray*}
m\ddot{z}+ c\dot{z} + kz = ma\omega^2e^{i\omega t}
\end{eqnarray*}
����āC��퉞�������肵��
\begin{eqnarray*}
z = Z_0e^{i\omega t}
\end{eqnarray*}
���㎮�ɑ������D
\begin{eqnarray*}
\left(-m\omega^2 + ic\omega + k\right)Z_0 = ma\omega^2 \\
\end{eqnarray*}
\begin{eqnarray*}
\therefore Z_0 &=& \frac{ma\omega^2}{k-m\omega^2 + ic\omega} = \frac{a\left(\frac{\omega}{p}\right)^2}{1-\left(\frac{\omega}{p}\right)^2 + 2i\zeta\frac{\omega}{p}} \\
&=& \frac{a\left(\frac{\omega}{p}\right)^2}{\left\{1-\left(\frac{\omega}{p}\right)^2\right\}^2 + \left(2\zeta\frac{\omega}{p}\right)^2}
\left[\left\{1-\left(\frac{\omega}{p}\right)^2\right\} - i\left(2\zeta\frac{\omega}{p}\right)\right]
\end{eqnarray*}
����āC
\begin{eqnarray*}
z &=&\frac{a\left(\frac{\omega}{p}\right)^2}{\left\{1-\left(\frac{\omega}{p}\right)^2\right\}^2 + \left(2\zeta\frac{\omega}{p}\right)^2}
\left[\left\{1-\left(\frac{\omega}{p}\right)^2\right\} - i\left(2\zeta\frac{\omega}{p}\right)\right]e^{i\omega t} \\
&=&\frac{a\left(\frac{\omega}{p}\right)^2}{\sqrt{\left\{1-\left(\frac{\omega}{p}\right)^2\right\}^2 + \left(2\zeta\frac{\omega}{p}\right)^2}} e^{i\left(\omega t - \varphi\right)}
\text{, }\varphi = \tan^{-1}\frac{2\zeta\frac{\omega}{p}}{1-\left(\frac{\omega}{p}\right)^2}
\end{eqnarray*}
����܂Œ��ׂĂ����n�Ɠ��l�̓����ƂȂ�̂ŁC$\zeta \le \frac{1}{\sqrt{2}}$�̂Ƃ��C$z$�́C�����]�p���x�i�ŗL�p�U�����߂��j�ʼn����U�����ő�ƂȂ�D���̎��̉�]������댯��]���C���邢�́C�댯���x�Ƃ����D
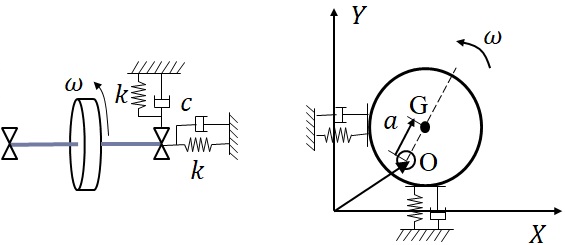
�}13-8�@�˂ƃ_�V���|�b�g�Ŏx�����ꂽ��]�̃��f��
13.4 ���K
(1) �ϑ��̃��[�^��}13-9�Ɏ����悤�Ɏx����̏�ɍڂ����Ƃ��C���̐ÓI�Ȃ���݂́C$100$mm�ł������D���[�^�ɂ͕s�肠����������̂Ƃ��C���̕s�肠���ɂ���Ċ�b�ɓ`���͂��C��b�Ƀ��[�^�ڃ{���g�~�߂����Ƃ���$1/35$�ɂ���ɂ́C���[�^�̉�]��������ɂ��ׂ����D�������C�x����̎��ʂ͖����ł���Ƃ���D
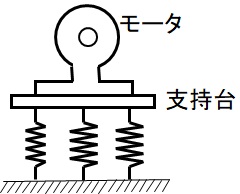
�}13-9�@�x����ɂ����ꂽ�ϑ����[�^�̐U��
(2) ����$500$kg�̉�]�@�B��$10^5$N/m�̂˒萔��L����˂ł�������D���̋@�B��$2\times10^{-2}$kgm�̉�]�s�ނ荇�������Ƃ��C��]��$20$s$^{-1}$�ɂ�����U���U���͂����炩�D������$\zeta=0.1$�Ƃ���D