
移動ロボット
カメラやLiDARを用いた自律移動・ナビゲーションの研究。未知環境での走行や障害物回避に取り組んでいます。
計算機視覚工学研究室は、山口大学 情報学部 情報学科に所属し、カメラやセンサを用いた環境認識・地図生成・ロボット制御に関する研究を行っています。 陸上・水中といった多様な環境での自律移動を目指し、理論と実機実験を組み合わせた研究を推進しています。
また、計算機視覚技術を教育分野に応用した英語学習支援アプリの開発にも取り組んでいます。 学部生・大学院生が、それぞれの研究テーマに取り組んでいます。
移動ロボット、点群地図生成、水中ロボット、英語学習支援アプリ
計算機視覚 / SLAM / 点群処理 / ロボティクス
山口大学 情報学部 情報学科
カメラやLiDARを用いた自律移動・ナビゲーションの研究。未知環境での走行や障害物回避に取り組んでいます。
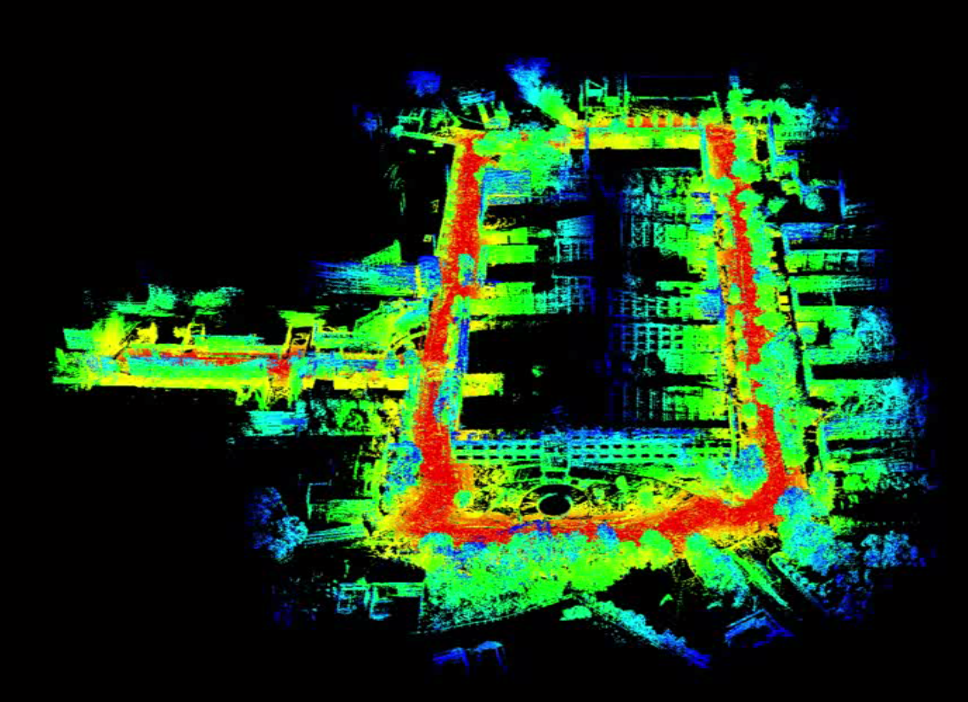
3D点群データから環境地図を構築するSLAM技術の研究。高精度な地図生成手法の開発に取り組んでいます。
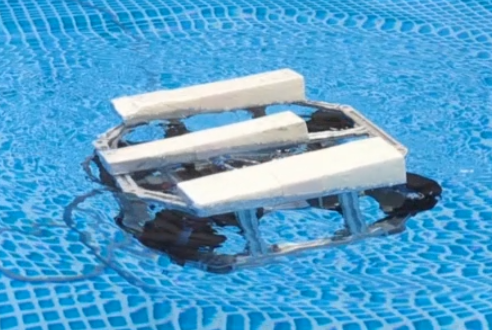
水中環境におけるロボットの自律航行・環境認識。視覚情報を活用した水中探索技術の開発を行っています。

計算機視覚・自然言語処理を活用した英語学習支援システムの開発。教育と技術の融合を目指しています。