移動ロボット

カメラやLiDARなどのセンサを搭載した移動ロボットの自律走行に関する研究を行っています。 環境認識、経路計画、障害物回避などの技術を統合し、屋内・屋外環境での自律ナビゲーションを実現します。
計算機視覚を用いた自己位置推定や、センサフュージョンによる堅牢な環境認識手法の開発に取り組んでいます。
計算機視覚工学研究室で取り組んでいる主な研究テーマです。
カメラやLiDARなどのセンサを搭載した移動ロボットの自律走行に関する研究を行っています。 環境認識、経路計画、障害物回避などの技術を統合し、屋内・屋外環境での自律ナビゲーションを実現します。
計算機視覚を用いた自己位置推定や、センサフュージョンによる堅牢な環境認識手法の開発に取り組んでいます。
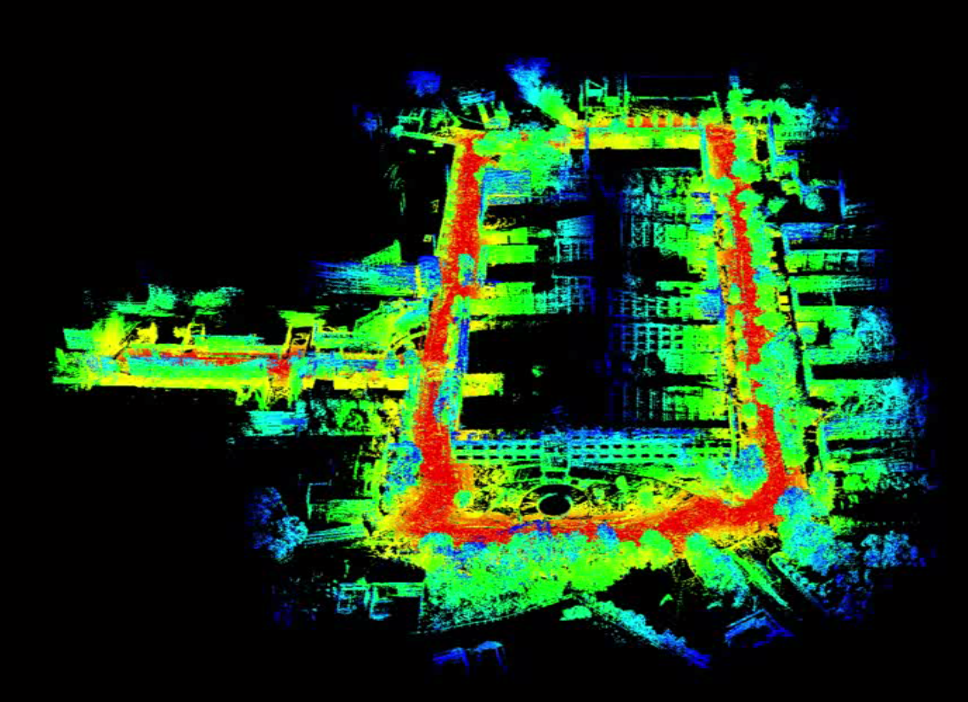
LiDARや深度カメラから取得した3D点群データを用いて、環境の地図を生成する研究です。 SLAM(Simultaneous Localization and Mapping)技術を中心に、高精度かつ効率的な地図構築手法の開発に取り組んでいます。
点群のレジストレーション、ループクロージャ検出、大規模環境への対応など、実用的な地図生成システムの構築を目指しています。
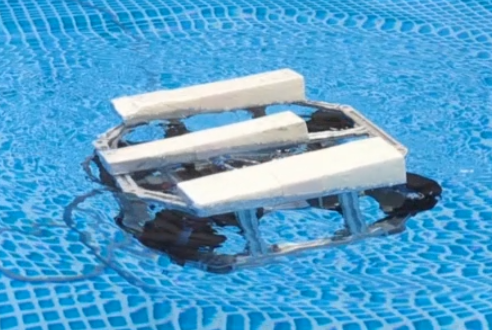
水中という特殊な環境におけるロボットの自律航行・環境探索に関する研究です。 水中ではGPSが使用できず、視界も制限されるため、カメラやソナーを用いた独自の認識・制御技術が必要となります。
水中ロボット(AUV/ROV)の開発と、水中環境における視覚ベースSLAMの研究を進めています。

計算機視覚や自然言語処理技術を活用し、英語学習を支援するアプリケーションの開発に取り組んでいます。 画像認識による語彙学習支援や、学習者の理解度に応じたコンテンツ提示など、教育と技術の融合を目指しています。
ロボット・視覚技術の研究で培った知見を教育分野に応用し、実用的な学習支援ツールの実現を目指しています。